
Cutting Carbon Emissions Is Harder Than the Glasgow Climate Pact Thinks
Standard cameras in stereo method can certainly detect objects, gauge their distance, and estimate their speeds, but they really do not have the precision required for completely autonomous driving. In addition, cameras do not perform perfectly at evening, in fog, or in direct sunlight, and techniques that use them are vulnerable to
remaining fooled by optical illusions. Laser scanning programs, or lidars, do provide their own illumination and consequently are generally exceptional to cameras in terrible weather conditions. Even so, they can see only straight ahead, together a very clear line of sight, and will therefore not be in a position to detect a motor vehicle approaching an intersection when concealed from perspective by buildings or other road blocks.
Radar is worse than lidar in array accuracy and angular resolution—the smallest angle of arrival essential concerning two distinct targets to solve one from yet another. But we have devised a novel radar architecture that overcomes these deficiencies, producing it significantly more successful in augmenting lidars and cameras.
Our proposed architecture employs what is called a sparse, broad-aperture multiband radar. The standard strategy is to use a assortment of frequencies, exploiting the certain properties of each individual one particular, to free of charge the procedure from the vicissitudes of the climate and to see by way of and all around corners. That procedure, in change, employs sophisticated sign processing and
sensor-fusion algorithms to create an built-in illustration of the ecosystem.
We have experimentally confirmed the theoretical functionality limits of our radar system—its vary, angular resolution, and accuracy. Right now, we’re developing hardware for many automakers to assess, and latest street exams have been effective. We program to carry out extra elaborate checks to reveal all-around-the-corner sensing in early 2022.
Every single frequency band has its strengths and weaknesses. The band at 77 gigahertz and underneath can go through 1,000 meters of dense fog with no dropping more than a portion of a decibel of sign power. Distinction that with lidars and cameras, which get rid of 10 to 15 decibels in just 50 meters of such fog.
Rain, having said that, is another story. Even mild showers will attenuate 77-GHz radar as a great deal as they would lidar. No difficulty, you may possibly think—just go to reduce frequencies. Rain is, soon after all, transparent to radar at, say, 1 GHz or under.
This operates, but you want the large bands as very well, for the reason that the small bands provide poorer selection and angular resolution. Whilst you cannot essentially equate substantial frequency with a narrow beam, you can use an antenna array, or extremely directive antenna, to undertaking the millimeter-prolonged waves in the higher bands in a narrow beam, like a laser. This signifies that this radar can compete with lidar units, though it would still suffer from the same incapability to see outside a line of sight.
For an antenna of offered size—that is, of a provided array aperture—the angular resolution of the beam is inversely proportional to the frequency of operation. In the same way, to reach a presented angular resolution, the expected frequency is inversely proportional to the antenna dimensions. So to realize some ideal angular resolution from a radar procedure at rather very low UHF frequencies (.3 to 1 GHz), for example, you’d want an antenna array tens of periods as significant as the a person you’d need for a radar working in the K (18- to 27-GHz) or W (75- to 110-GHz) bands.
Even although lower frequencies don’t assistance much with resolution, they deliver other advantages. Electromagnetic waves are inclined to diffract at sharp edges when they come upon curved surfaces, they can diffract correct close to them as “creeping” waves. These results are way too weak to be helpful at the better frequencies of the K band and, primarily, the W band, but they can be considerable in the UHF and C (4- to 8-GHz) bands. This diffraction habits, together with lower penetration decline, lets these types of radars to detect objects
close to a corner.
A person weak spot of radar is that it follows quite a few paths, bouncing off countless objects, on its way to and from the item staying tracked. These radar returns are additional sophisticated by the presence of lots of other automotive radars on the road. But the tangle also provides a energy: The widely ranging ricochets can supply a personal computer with facts about what’s likely on in sites that a beam projected alongside the line of sight just can’t reach—for occasion, revealing cross website traffic that is obscured from immediate detection.
To see considerably and in detail—to see sideways and even straight by obstacles—is a assure that radar has not nevertheless entirely realized. No a single radar band can do it all, but a program that can work at the same time at various frequency bands can appear very shut. For instance, superior-frequency bands, these kinds of as K and W, can give large resolution and can precisely estimate the locale and speed of targets. But they simply cannot penetrate the partitions of buildings or see all around corners what is a lot more, they are susceptible to weighty rain, fog, and dust.
Reduce frequency bands, these kinds of as UHF and C, are a lot fewer susceptible to these troubles, but they require greater antenna factors and have much less offered bandwidth, which minimizes assortment resolution—the capacity to distinguish two objects of related bearing but diverse ranges. These lower bands also require a huge aperture for a provided angular resolution. By putting jointly these disparate bands, we can harmony the vulnerabilities of a single band with the strengths of the many others.
Distinct targets pose unique challenges for our multiband resolution. The entrance of a automobile provides a smaller radar cross section—or efficient reflectivity—to the UHF band than to the C and K bands. This signifies that an approaching vehicle will be much easier to detect employing the C and K bands. Further, a pedestrian’s cross area exhibits significantly less variation with regard to adjustments in his or her orientation and gait in the UHF band than it does in the C and K bands. This indicates that people will be a lot easier to detect with UHF radar.
Also, the radar cross portion of an object decreases when there is drinking water on the scatterer’s surface. This diminishes the radar reflections calculated in the C and K bands, although this phenomenon does not notably influence UHF radars.
The tangled return paths of radar are also a power for the reason that they can give a computer system with data about what’s heading on sideways—for instance, in cross targeted visitors that is obscured from immediate inspection.
An additional important difference arises from the reality that a signal of a reduced frequency can penetrate walls and go via properties, whilst larger frequencies are not able to. Think about, for instance, a 30-centimeter-thick concrete wall. The capacity of a radar wave to pass through the wall, relatively than mirror off of it, is a operate of the wavelength, the polarization of the incident discipline, and the angle of incidence. For the UHF band, the transmission coefficient is all over –6.5 dB around a massive variety of incident angles. For the C and K bands, that value falls to –35 dB and –150 dB, respectively, which means that really minimal energy can make it as a result of.
A radar’s angular resolution, as we mentioned before, is proportional to the wavelength utilized but it is also inversely proportional to the width of the aperture—or, for a linear array of antennas, to the bodily size of the array. This is a single reason why millimeter waves, these types of as the W and K bands, might perform very well for autonomous driving. A industrial radar unit based on two 77-GHz transceivers, with an aperture of 6 cm, offers you about 2.5 degrees of angular resolution, a lot more than an get of magnitude worse than a common lidar procedure, and too tiny for autonomous driving. Attaining lidar-standard resolution at 77 GHz needs a substantially wider aperture—1.2 meters, say, about the width of a auto.
Other than range and angular resolution, a car’s radar process ought to also keep observe of a large amount of targets, in some cases hundreds of them at after. It can be hard to distinguish targets by vary if their variety to the auto differs by just a few meters. And for any supplied assortment, a uniform linear array—one whose transmitting and receiving features are spaced equidistantly—can distinguish only as several targets as the variety of antennas it has. In cluttered environments in which there might be a multitude of targets, this may well feel to indicate the want for hundreds of such transmitters and receivers, a issue produced worse by the have to have for a really massive aperture. That a great deal components would be high priced.
One way to circumvent the difficulty is to use an array in which the aspects are placed at only a few of the positions they normally occupy. If we structure these a “sparse” array carefully, so that just about every mutual geometrical length is one of a kind, we can make it behave as well as the nonsparse, total-size array. For occasion, if we begin with a 1.2-meter-aperture radar running at the K band and set in an properly developed sparse array getting just 12 transmitting and 16 receiving things, it would behave like a conventional array possessing 192 aspects. The purpose is that a cautiously made sparse array can have up to 12 × 16, or 192, pairwise distances involving every transmitter and receiver. Employing 12 various signal transmissions, the 16 receive antennas will acquire 192 alerts. Mainly because of the unique pairwise length concerning every transmit/obtain pair, the resulting 192 obtained alerts can be built to behave as if they were been given by a 192-ingredient, nonsparse array. Therefore, a sparse array allows a person to trade off time for space—that is, sign transmissions with antenna components.
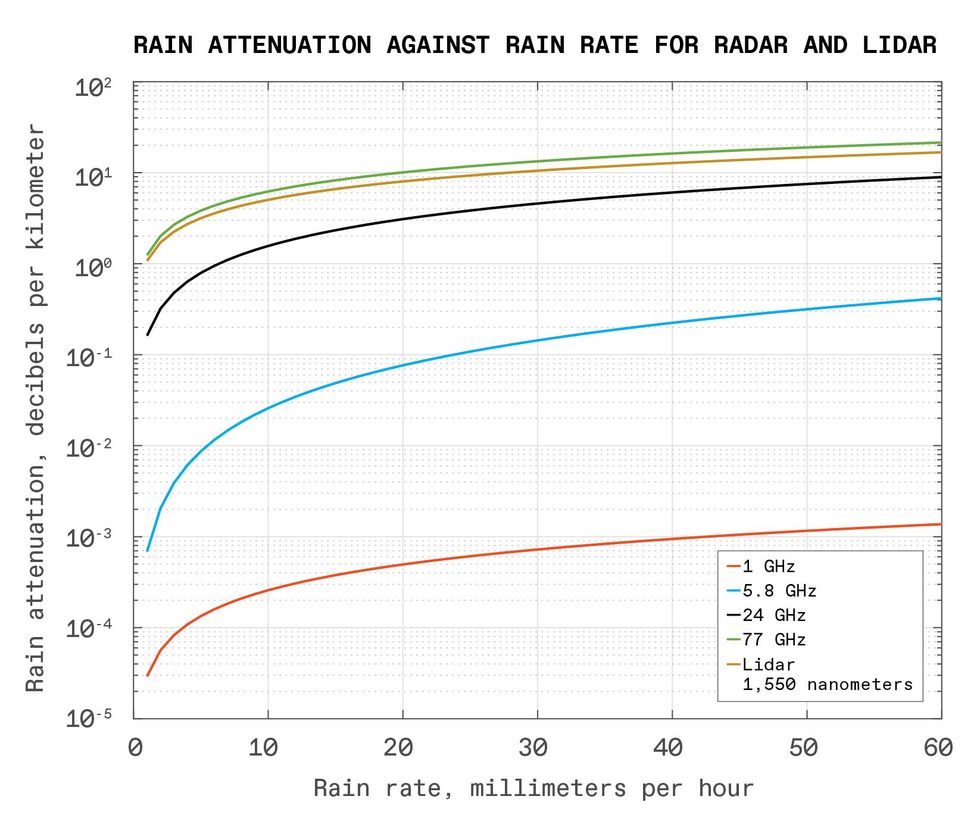
Viewing in the rain is commonly significantly much easier for radar than for gentle-dependent sensors, notably lidar. At fairly minimal frequencies, a radar signal’s reduction of power is orders of magnitude decrease.Neural Propulsion Techniques
In principle, different radar units put along an imaginary array on a car should work as a one phased-array unit of larger sized aperture. Nevertheless, this scheme would involve the joint transmission of each transmit antenna of the individual subarrays, as well as the joint processing of the information gathered by every antenna factor of the blended subarrays, which in flip would involve that the phases of all subarray units be correctly synchronized.
None of this is uncomplicated. But even if it could be implemented, the general performance of this sort of a perfectly synchronized dispersed radar would even now tumble nicely limited of that of a thoroughly created, fully built-in, broad-aperture sparse array.
Contemplate two radar systems at 77 GHz, each and every with an aperture size of 1.2 meters and with 12 transmit and 16 obtain elements. The to start with is a thoroughly designed sparse array the next destinations two 14-component normal arrays on the extraordinary sides of the aperture. Both programs have the exact same aperture and the similar variety of antenna elements. But when the built-in sparse structure performs similarly well no matter exactly where it scans, the divided variation has problems hunting straight in advance, from the entrance of the array. That’s because the two clumps of antennas are broadly separated, generating a blind location in the middle.
In the extensively separated state of affairs, we presume two situations. In the very first, the two regular radar arrays at both close of a divided program are somehow completely synchronized. This arrangement fails to detect objects 45 per cent of the time. In the 2nd scenario, we assume that every array operates independently and that the objects they’ve each independently detected are then fused. This arrangement fails almost 60 percent of the time. In contrast, the cautiously designed sparse array has only a negligible likelihood of failure.
Viewing close to the corner can be depicted very easily in simulations. We regarded as an autonomous auto, geared up with our system, approaching an city intersection with 4 large-rise concrete properties, 1 at each and every corner. At the beginning of the simulation the auto is 35 meters from the middle of the intersection and a 2nd car is approaching the heart by using a crossing street. The approaching vehicle is not within just the autonomous vehicle’s line of sight and so are unable to be detected without the need of a signifies of viewing all around the corner.
At each individual of the a few frequency bands, the radar procedure can estimate the assortment and bearing of the targets that are in the line of sight. In that case, the variety of the concentrate on is equivalent to the velocity of light-weight multiplied by 50 % the time it requires the transmitted electromagnetic wave to return to the radar. The bearing of a target is identified from the incident angle of the wavefronts acquired at the radar. But when the targets are not within the line of sight and the signals return alongside a number of routes, these techniques can’t straight evaluate either the range or the position of the goal.
We can, however,
infer the range and placement of targets. To start with we need to have to distinguish amongst line-of-sight, multipath, and by way of-the-developing returns. For a presented variety, multipath returns are generally weaker (because of to numerous reflections) and have various polarization. Via-the-building returns are also weaker. If we know the basic environment—the place of buildings and other stationary objects—we can build a framework to find the feasible positions of the correct concentrate on. We then use that framework to estimate how most likely it is that the concentrate on is at this or that place.
As the autonomous automobile and the numerous targets go and as a lot more information is gathered by the radar, each and every new piece of evidence is utilised to update the possibilities. This is Bayesian logic, acquainted from its use in medical analysis. Does the affected person have a fever? If so, is there a rash? Here, each and every time the car’s process updates the estimate, it narrows the assortment of alternatives right until at last the real goal positions are revealed and the “ghost targets” vanish. The efficiency of the program can be considerably enhanced by fusing facts received from several bands.
We have employed experiments and numerical simulations to appraise the theoretical effectiveness boundaries of our radar method beneath numerous operating conditions. Highway checks confirm that the radar can detect alerts coming by occlusions. In the coming months we system to show round-the-corner sensing.
The general performance of our procedure in phrases of array, angular resolution, and ability to see about a corner really should be unprecedented. We anticipate it will allow a type of driving safer than we have ever regarded.
From Your Web page Articles or blog posts
Related Articles Close to the Website







